When we for the 1’st time detect movement:
on Presence#Detection=1 do //*When the doppler sensor “Presence#Detection“is triggered=1, Start executing this Rules Function*\\
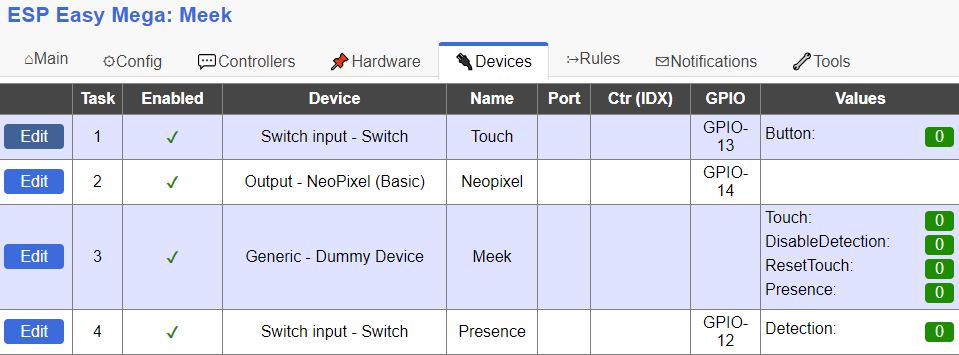
if [Meek#DisableDetection]=0 and [Meek#Presence]=0 and [Meek#Touch]=0 //*In case of “Meek#DisableDetection” & “Meek#Presence” & “Meek#Touch” are all equal to 0*\\
gpio 4,1 //*set SSR output 1= lights on*\\
Neopixel,1,50,0,50 //*set the RGWB LED 1, to Purple (you can play with these values from 0-255 for other color LED indicator)*\\
TaskValueSet 3,4,1 //*sets “Meek#Presence” on 1, so we know movement is detected*\\
timerSet,1,25 //*Start timer 1 with a delay of 25 seconds*\\
timerSet,2,0 //*Reset timer 2, in case this is active*\\
endif //*END this IF function*\\
endon //*END the “Presence#Detection” session *\\
When movement detected after the 1’st time detection:
on Presence#Detection=1 do //*When the doppler sensor “Presence#Detection“is triggered=1, Start executing this Rules Function*\\
if [Meek#DisableDetection]=0 and [Meek#Presence]=1 //*In case of “Meek#DisableDetection” is equal to 0 & “Meek#Presence” is equal to 1, do the following*\\
Neopixel,1,50,0,50 //*set the RGWB LED 1, to Purple (you can play with these values from 0-255 for other color LED indicator)*\\
timerSet,1,25 //*Start timer 1 with a delay of 25 seconds*\\
timerSet,2,0 //*Reset timer 2, so it does not interfere with ongoing timer executions*\\
endif //*END the IF funmction*\\
endon //*END this session *\\
When the first timer expires:
on Rules#Timer=1 do //*When timer 1 starts counting, execute this Rules Function*\\
else //*When timer 1 expires(=0), execute this Rules Function*\\
Neopixel,1,0,0,50 //*set the RGWB LED 1, to Blue (you can play with these values from 0-255 for other color LED indicator)*\\
timerSet,2,15 //*Start timer 2 with a 15 seconds countdown*\\
endif //*END the IF funmction*\\
endon //*END the “Rules#Timer1” session *\\
on Rules#Timer=2 do /*When timer 2 starts counting, execute this Rules Function*\\
else //*When timer 2 expires(=0), execute this Rules Function*\\
Neopixel,1,25,25,25 //*set the RGWB LED 1, to Blue (you can play with these values from 0-255 for other color LED indicator)*\\
TaskValueSet 3,4,0 //*sets “Meek#Presence” on 0, so we know there is no movement detected during the pasing of the timers 1 & 2*\\
gpio 4,0 //*set SSR output 0= lights off*\\
endif //*END the IF funmction*\\
endon //*END the “Rules#Timer=2” session *\\